-
23 February 2023Karsan Hydrogen Fuel Cell Bus e-ATA Hydrogen
-
17 July 2024Small City Buses: The Eco-Friendly Choice for Urban Commutes
-
23 September 2024Different Bus Sizes in Urban Transportation
-
02 October 2024What is a Shuttle Bus? How is it Used in Urban Transportation?
-
12 June 2026Electric Airport Shuttles: The Case for Going Green
-
05 June 2026Level 4 vs Other Autonomy Levels: What Sets It Apart?
-
29 May 2026Green Hydrogen vs. Battery Electric: Which Zero-Emission Bus Is Right for Your City?
-
22 May 2026Why Romania Is One of Europe's Fastest-Growing Electric Bus Markets?
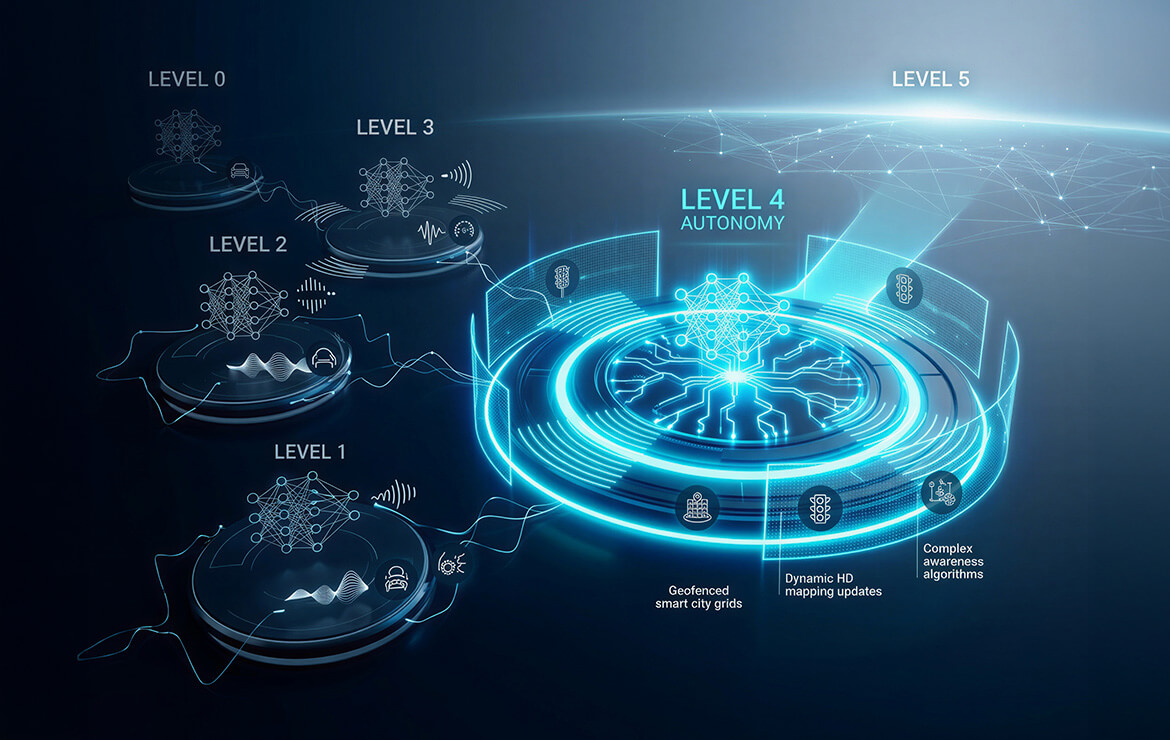
In the rapidly evolving landscape of mobility, the term "autonomous" is often utilized as a broad descriptor, yet the technical and operational chasm between a vehicle that assists with lane-keeping and one that navigates independently is vast. For transit authorities and municipal planners looking to modernize their infrastructure, understanding the SAE J3016 levels—the globally recognized standard that defines the six levels of driving automation—is a strategic necessity. Developed by the Society of Automotive Engineers, this framework provides a universal language that categorizes technology from Level 0 (no automation) to Level 5 (full autonomy), ensuring that stakeholders can distinguish between marketing terms and actual technical capabilities.
By establishing this shared technical foundation, city planners can engage in smarter, long-term infrastructure development that prioritizes future-ready technologies over incremental updates. This clarity is vital for minimizing human error in complex urban environments, as it allows authorities to identify exactly where the operational responsibility lies at any given moment. At this intersection of policy and engineering, innovation rises to meet the highest operational standards, allowing cities to reclaim their streets for safer and more efficient movement.
Understanding the Levels of Driving Automation
The automotive and transit industries classify automation on a standardized scale to define the transition from human control to machine intelligence. Levels 0 through 2 are categorized as "Driver Support Features," where the human operator remains the primary pilot and must monitor the environment at all times. Level 3 introduces "Conditional Automation," which allows the system to take control under specific circumstances, though it still requires a human to be ready to intervene immediately upon request. Level 4, however, introduces "High Automation," where the vehicle’s digital architecture assumes full and final responsibility for the driving task within its designated environment.
While lower-level support systems are engineered to enhance human performance by providing tactical assistance, they do not relieve the driver of the duty to maintain constant awareness. Consequently, the introduction of high automation enables a fundamental shift toward independent operation, which effectively redefines the traditional boundaries of vehicle control and liability. As autonomy scales toward Level 5—where a vehicle can drive anywhere in any condition—this deep technical understanding becomes essential for informed, strategic decision-making in the public sector.
Level 2 vs Level 3 vs Level 4: Key Differences
The primary differentiator across these tiers is the "Request to Intervene," a protocol that defines who—or what—is responsible for the safety of the vehicle at any given millisecond. In Level 2 (Partial Automation), the human driver is always "in the loop" and must maintain physical contact with the controls. In Level 3 (Conditional Automation), the vehicle manages most tasks, but the human remains the "fallback" and must be ready to take over at a moment's notice. In contrast, Level 4 (High Automation) removes the request to intervene entirely within the vehicle's Operational Design Domain (ODD), meaning the system is the sole authority during the journey.
The most critical advancement in Level 4 autonomy is that it effectively eliminates the "handover risk," which is the danger associated with a system suddenly forcing a human to take control during a complex situation. By assuming full responsibility within defined conditions, the system prioritizes safety through a consistent automated control architecture that manages unexpected anomalies without human delay. If the system encounters a situation it cannot resolve, it performs a "Minimal Risk Maneuver," such as safely bringing the vehicle to a controlled stop, ensuring that performance remains reliable and predictable.
Why Level 4 Is a Turning Point for Public Transport
For municipal transit, Level 4 is considered the "optimal maturity level" because it facilitates fully driverless operations without the multi-decade development timeline required for universal Level 5 autonomy. Because public transit typically operates on predictable, structured, and fixed routes, high-automation systems can be integrated into existing grids today to address critical labor shortages and rising operational expenditures. This pragmatic approach allows cities to enjoy the benefits of autonomy within mapped urban boundaries while the broader technological landscape continues to mature.
Fixed routes align seamlessly with the logic of autonomous navigation, where predictability enhances both operational stability and environmental safety for all road users. Because this technology is already optimized for real-world deployment, commercial use has transitioned from a future vision into a present-day solution that allows cities to scale their transit capacity effectively. As these operations grow, efficiency becomes a clear and measurable performance standard that helps municipalities lower their per-kilometer costs and improve service frequency.
Use Cases Across Different Autonomy Levels
Different levels of automation serve distinct market needs based on the complexity of the environment and the predictability of the route. While Level 2 is suited for long-haul highway safety, Level 4 is perfectly calibrated for campus shuttles, airport transfers, and "last-mile" residential loops. Specialized solutions like the Autonomous e-ATAK and the Autonomous e-JEST are designed specifically for these structured environments, offering a niche-focused approach that ensures high automation is deployed where it can provide the most immediate and reliable value to the community.
Why Public Transport Is Leading Level 4 Adoption
Unlike the unpredictable nature of private passenger travel, public transport operates within a structured framework that provides the ideal foundation for Level 4 autonomy. Transit agencies are emerging as the global leaders in adoption because the Return on Investment (ROI) is quantifiable through 24/7 service capability and reduced long-term labor costs. By establishing a standardized safety record that human operators cannot consistently replicate over long shifts, public transit has solidified its role as the primary leader in the global autonomous revolution.
Conclusion: The Path Toward Intelligent Mobility
Level 4 autonomy is not merely an incremental improvement; it is a structural transformation of how we move people through cities. By removing the dependency on a human fallback, we unlock a level of service reliability and safety that was previously impossible to achieve. As municipalities transition from trial phases to permanent deployments, the distinction between "assistance" and "independence" will define the leaders of the next urban era. The future of transit is not just electric—it is autonomous, intelligent, and ready for deployment.