
-
23 febrero 2023¿Qué es un autobús con celda de combustible de hidrógeno?
-
17 julio 2024Autobuses Pequeños para Ciudades: La Opción Ecológica para los Desplazamientos Urbanos
-
23 septiembre 2024Diferentes Tamaños de Autobuses en el Transporte Urbano
-
24 junio 2026Carga de autobuses eléctricos: guía para gestores de flota
-
19 junio 2026Zonas de Bajas Emisiones: una guía para operadores de transporte
-
12 junio 2026Lanzaderas aeroportuarias eléctricas: el argumento a favor de la transición verde
-
05 junio 2026Nivel 4 vs. otros niveles de autonomía: ¿qué lo distingue?
La transición de un vehículo operado por una persona a un sistema sin conductor no consiste simplemente en sustituir al conductor; implica la implementación de un sofisticado sistema nervioso digital. La tecnología autónoma de nivel 4 representa un avance significativo en ingeniería, donde el vehículo es capaz de realizar todas las funciones de conducción bajo condiciones específicas sin intervención humana. Esta tecnología está diseñada para navegar por entornos urbanos complejos con precisión matemática, transformando la propia naturaleza del transporte público.
El transporte autónomo representa el futuro de la eficiencia, donde el software moderno sustituye los reflejos humanos y el hardware de alta tecnología actúa como órgano sensorial. Esta sofisticada configuración permite que los datos fluyan en tiempo real, garantizando que la seguridad esté profundamente integrada en cada línea de código para ofrecer un rendimiento operativo superior.
¿Qué es la autonomía de nivel 4?
En el contexto de los estándares SAE (Society of Automotive Engineers), el nivel 4 se refiere a la «alta automatización». A diferencia de los niveles inferiores, que requieren que un conductor permanezca atento, un autobús de nivel 4 gestiona su propia seguridad, navegación y respuestas de emergencia dentro de un área geocercada o de un dominio de diseño operativo específico (ODD). Esto significa que el autobús puede operar en una ruta fija, como un campus universitario o un circuito urbano, de forma totalmente autónoma.
En este entorno, el autobús gestiona todas las tareas de conducción de manera independiente, sin requerir respaldo humano dentro de sus rutas geocercadas designadas. Esto crea un sistema plenamente autosuficiente, donde la propia tecnología define los límites operativos para mantener un servicio seguro y predecible.
Cómo los autobuses autónomos perciben su entorno
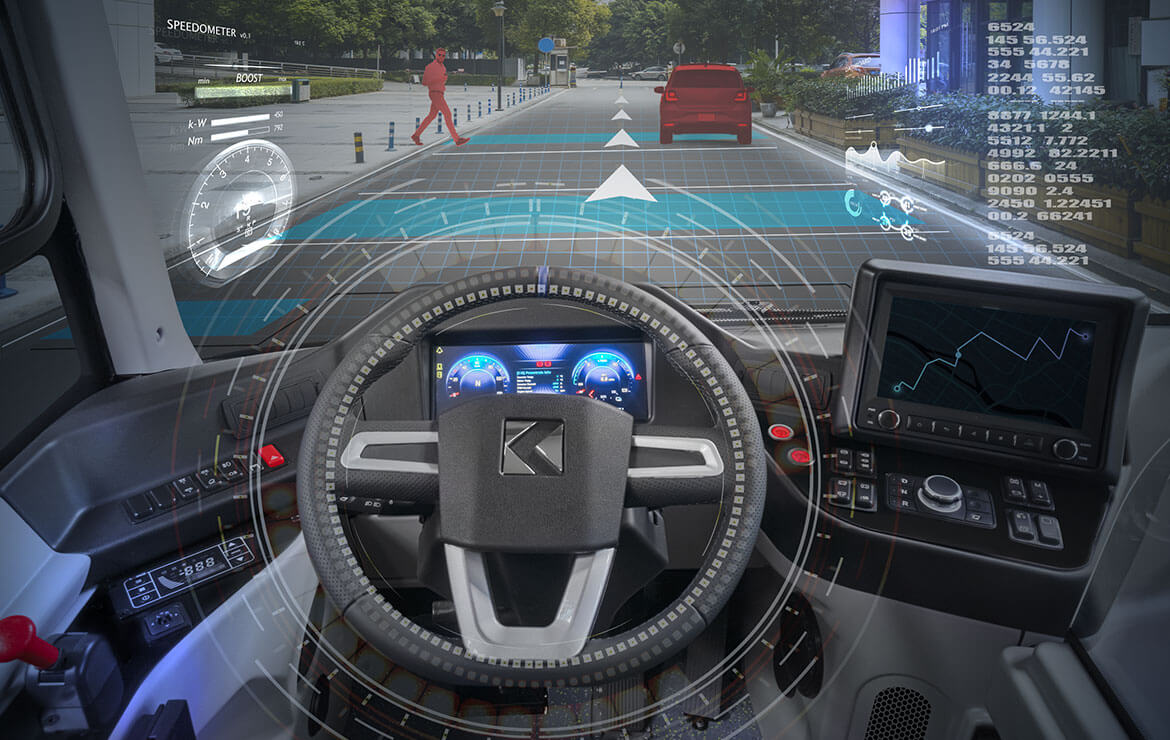
Para desplazarse de forma segura, un autobús autónomo debe «ver» el mundo en 360 grados. Los sistemas de nivel 4 utilizan una técnica llamada fusión de sensores, que combina datos de múltiples fuentes para crear un mapa de alta definición del entorno.
• LiDAR: Utiliza pulsos láser para medir distancias y crear una nube de puntos 3D de los objetos.
• Radar: Detecta la velocidad y la distancia de los objetos en movimiento, incluso con mal tiempo.
• Cámaras térmicas: Identifican seres vivos mediante sus firmas térmicas.
• Cámaras de alta resolución: Leen señales de tráfico, semáforos y marcas viales.
Al percibir los obstáculos al instante, el vehículo utiliza LiDAR para crear un gemelo digital, mientras que los sensores térmicos trabajan activamente para proteger a los peatones. Como la percepción del sistema es más rápida que la visión humana y no se ve afectada por condiciones meteorológicas adversas, garantiza una seguridad constante en todas las condiciones de operación.
Cómo toman decisiones de conducción en tiempo real
Una vez recopilados los datos, el «cerebro» del autobús —una plataforma informática impulsada por IA— procesa miles de variables por segundo. Esto se conoce como planificación de rutas, donde el sistema evalúa el flujo del tráfico, el comportamiento de los peatones y las normas de circulación para decidir si debe acelerar, frenar o girar. Este proceso de toma de decisiones es constante, eliminando eficazmente los riesgos asociados a la fatiga o distracción humana.
Utilizando la lógica para gestionar el riesgo, la IA del sistema calcula la ruta más segura posible prediciendo los movimientos del tráfico mediante procesos de decisión estandarizados. Estos sofisticados algoritmos trabajan en armonía para garantizar una experiencia de transporte fluida, eficiente y fiable para todos los pasajeros.
Cómo el sistema controla el vehículo: Drive-by-Wire
La transición de una decisión digital a un movimiento físico se realiza mediante la tecnología Drive-by-Wire. En lugar de conexiones mecánicas, señales electrónicas controlan la dirección, el frenado y la aceleración. Esto garantiza que la ejecución de la trayectoria definida por la IA sea precisa al centímetro.
Al sustituir las piezas mecánicas tradicionales por componentes electrónicos de alta precisión, el sistema logra una dirección muy exacta y respuestas de frenado inmediatas. Operando en apenas milisegundos, esta tecnología Drive-by-Wire garantiza que el rendimiento del vehículo se mantenga constante y perfectamente alineado con sus comandos digitales.
Seguridad y redundancia en los sistemas de nivel 4
Un aspecto crítico de la automatización de alto nivel es la redundancia, lo que significa que cada sistema crítico —desde la alimentación hasta la dirección— debe contar con una copia de seguridad dedicada. Si un sensor o controlador falla, otros compensan de inmediato para mantener el control. Esta arquitectura de funcionamiento seguro ante fallos garantiza que el vehículo siempre pueda alcanzar un estado seguro, proporcionando tranquilidad tanto a pasajeros como a operadores.
Con la fiabilidad como máxima prioridad, el sistema utiliza una lógica fail-safe obligatoria y múltiples sensores para evitar puntos ciegos. Estas copias de seguridad integradas protegen cada operación, garantizando que el sistema mantenga siempre su principal enfoque en la seguridad de los pasajeros por encima de todo.
Dónde se utilizan hoy los autobuses autónomos de nivel 4
Los autobuses de nivel 4 ya no son experimentales; están operativos. Desde campus universitarios como Michigan State University hasta rutas urbanas públicas en Europa, modelos innovadores como el Autonomous e-ATAK y el Autonomous e-JEST están demostrando su valor. Estos vehículos ofrecen un servicio constante en entornos controlados, ayudando a resolver la escasez de conductores y a reducir la congestión urbana.
Estos proyectos reales demuestran la viabilidad de la tecnología, prosperando en entornos como campus universitarios y circuitos urbanos sin conductor. A medida que la eficiencia aumenta día a día, Karsan continúa liderando este despliegue global, mostrando el futuro de la movilidad urbana inteligente.

