
-
23 February 2023Karsan Hydrogen Fuel Cell Bus e-ATA Hydrogen
-
17 July 2024Small City Buses: The Eco-Friendly Choice for Urban Commutes
-
23 September 2024Different Bus Sizes in Urban Transportation
-
02 October 2024What is a Shuttle Bus? How is it Used in Urban Transportation?
-
24 June 2026Electric Bus Charging: A Fleet Manager's Guide
-
19 June 2026Low Emission Zones: A Guide for Transit Operators
-
12 June 2026Electric Airport Shuttles: The Case for Going Green
-
05 June 2026Level 4 vs Other Autonomy Levels: What Sets It Apart?
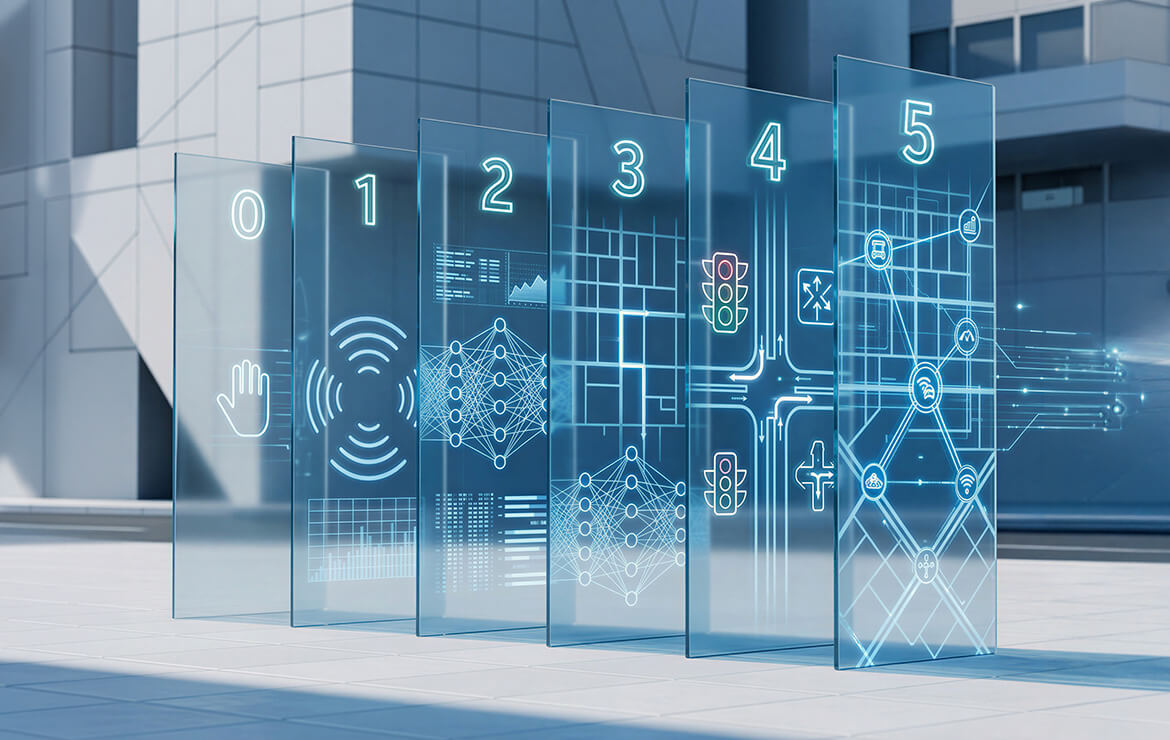
The terminology surrounding self-driving technology can often be dense and confusing for the general public, making it difficult to distinguish between simple assistance and true autonomy. To standardize this global conversation, the SAE (Society of Automotive Engineers) established a framework of six distinct levels of automation, ranging from zero to five. This taxonomy is essential because it provides a universal language that helps municipalities, regulators, and passengers understand exactly what a vehicle’s digital system is—and is not—capable of performing. Consequently, by tracing this evolution from basic driver support to full independence, we can better understand the roadmap toward a more efficient and connected urban future.
What Are the 6 Levels of Driving Automation?
The SAE J3016 standard categorizes automation on a scale that measures how much of the "dynamic driving task" is handled by the machine versus the human. As a vehicle moves up this scale from Level 0 to Level 5, the legal and operational responsibility shifts progressively away from the human operator and toward the vehicle's onboard computing architecture. This six-tier journey is defined primarily by this shift in responsibility, where system complexity increases until the technology assumes total lead in navigation and safety. Understanding these tiers is vital for city planners, as each level serves a specific use case in the modern transportation market.
Level 0–2: Driver Support Systems
Levels 0 through 2 describe features that are already widely available in today's automotive market, where the human is still considered the primary driver. Even though the vehicle provides significant assistance through these systems, human oversight remains a mandatory requirement for safe operation.
-
Level 0 (No Automation): The human performs all driving tasks while the system provides only passive warnings, such as blind-spot alerts, without intervening in the vehicle's movement.
-
Level 1 (Driver Assistance): The system shares control of either steering or speed through features like Adaptive Cruise Control, but it never manages both simultaneously.
-
Level 2 (Partial Automation): The vehicle can control hem steering and acceleration or deceleration at the same time, though the driver must remain physically engaged and monitor the surroundings at all times.
While these support features are designed to enhance safety, they remain fundamentally human-centric. They require constant "hands-on" engagement to ensure that the human driver remains the final authority on the road, distinguishing them clearly from higher levels of independent autonomy.
Level 3: Conditional Automation and the Handoff Challenge
Level 3 represents a significant technological leap because, under very specific conditions like highway traffic, the vehicle can monitor the environment and drive itself. However, this stage still requires a human "fallback" who must be ready to intervene at any moment. If the system encounters a situation it cannot handle, it issues a request for the human to take over within seconds, creating a transition of control that remains a significant logistical hurdle. Because this sudden "handoff" can present safety and liability challenges in complex urban settings, public transit often skips this stage in favor of more definitive and predictable automation levels.
Level 4: High Automation in Real-World Use
Level 4 is where true "driverless" transit begins, as the vehicle becomes capable of performing all driving functions and monitoring the environment without any expectation of human intervention. Although this autonomy is limited to a specific "Operational Design Domain" (ODD)—such as a pre-mapped city loop or a controlled campus—the vehicle serves as the sole authority within that boundary. Furthermore, Level 4 systems are engineered to reach a "minimal risk condition," such as a safe stop, automatically if a system failure occurs. As real-world commercial use expands, these domain-specific routes provide the necessary structure for the digital system to function as the primary pilot, making this level highly effective for modern transit solutions.
The Role of the On-Board Steward: Why Is Someone Still There?
A common question during Level 4 deployments is why a person is still present in the cabin if the bus is truly autonomous. While the technology does not require a driver to operate the vehicle, many operators utilize "Safety Operators" or "On-Board Stewards" as a bridge for passenger confidence. These professionals serve critical non-driving functions, such as assisting passengers with disabilities or managing boarding during peak hours, which helps riders acclimate to the technology. Additionally, their presence often satisfies current global regulations that still require a licensed individual to be present as a legal formality during the transition toward fully unmanned operations.
Level 5: Full Autonomy — Vision vs. Reality
Level 5 represents the ultimate goal of autonomous mobility: a vehicle capable of driving anywhere, at any time, and in any weather condition without any human assistance. Unlike Level 4, there are no geofences or geographical limitations to this level of independence, allowing the vehicle to operate on any public road. While innovation continues to push toward this universal capability, Level 5 remains a long-term research and development goal rather than a commercially available reality in today's market. Consequently, current commercial efforts remain focused on refining Level 4 technology to ensure safe and efficient deployment in controlled urban environments.
Conclusion: Closing the Urban Mobility Gap
For the future of our cities, these levels of automation represent more than just technical milestones; they are essential tools for social and operational inclusion. As we move into the era of Level 4 adoption, public transit becomes more frequent, safer, and accessible to underserved communities. Innovative solutions such as the Autonomous e-ATAK and Autonomous e-JEST are already proving that this technology is ready to serve as the backbone of the modern, intelligent city. By effectively closing the "first and last mile" gap, high automation is completing the mobility chain and ensuring that the future of transit is ready for deployment today.

