
-
17 Juli 2024Kompaktstadtbusse: Die umweltfreundliche Wahl für den Stadtverkehr
-
23 September 2024Verschiedene Busgrößen im städtischen Nahverkehr
-
02 Oktober 2024Was ist ein Shuttlebus und wie wird er im städtischen Verkehr eingesetzt?
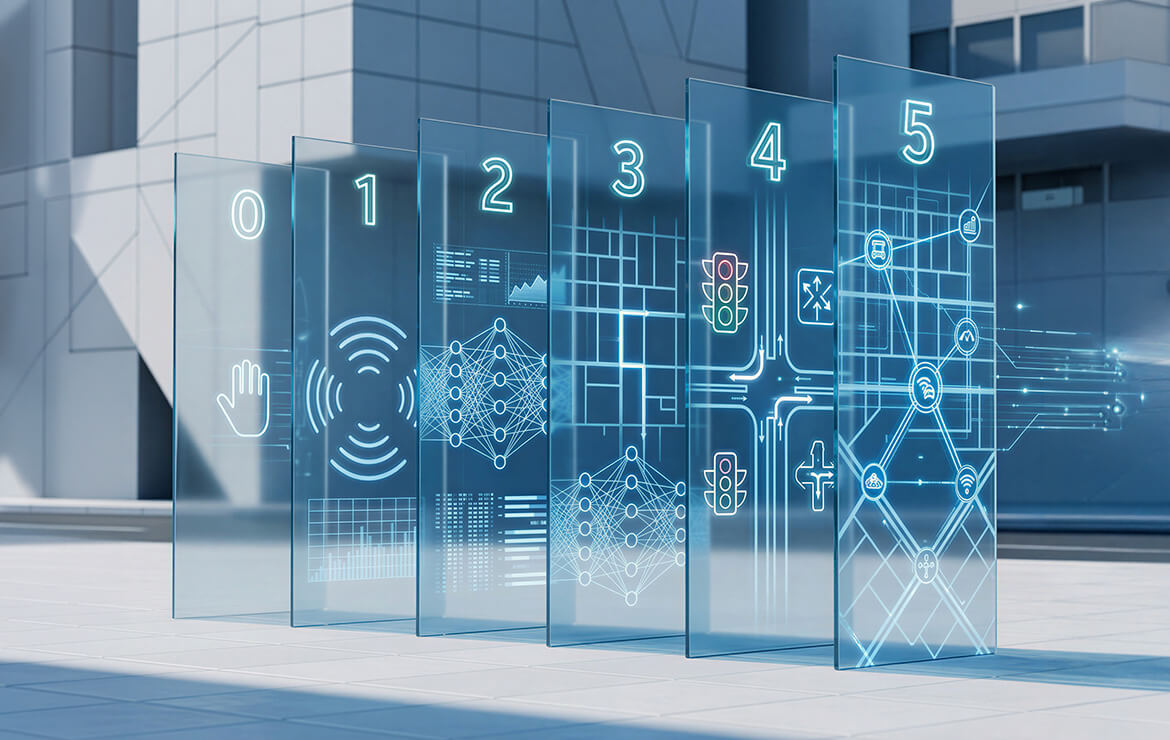
Die Terminologie rund um selbstfahrende Technologien kann für die breite Öffentlichkeit oft komplex und verwirrend sein, wodurch es schwierig wird, zwischen einfacher Unterstützung und echter Autonomie zu unterscheiden. Um diese globale Diskussion zu standardisieren, hat die SAE (Society of Automotive Engineers) einen Rahmen mit sechs klar definierten Automatisierungsstufen von null bis fünf festgelegt. Diese Taxonomie ist wesentlich, da sie eine universelle Sprache bietet, die Kommunen, Regulierungsbehörden und Fahrgästen hilft, genau zu verstehen, was das digitale System eines Fahrzeugs leisten kann — und was nicht. Indem wir diese Entwicklung von grundlegender Fahrerunterstützung bis hin zu vollständiger Unabhängigkeit nachvollziehen, können wir den Fahrplan hin zu einer effizienteren und vernetzteren urbanen Zukunft besser verstehen.
Was sind die 6 Stufen der Fahrautomatisierung?
Der SAE J3016-Standard klassifiziert Automatisierung auf einer Skala, die misst, wie viel der „dynamischen Fahraufgabe“ von der Maschine im Vergleich zum Menschen übernommen wird. Während ein Fahrzeug auf dieser Skala von Level 0 bis Level 5 aufsteigt, verlagert sich die rechtliche und operative Verantwortung schrittweise vom menschlichen Bediener hin zur bordeigenen Computerarchitektur des Fahrzeugs. Diese sechsstufige Entwicklung wird vor allem durch diesen Verantwortungswechsel definiert, wobei die Systemkomplexität zunimmt, bis die Technologie vollständig die Führung bei Navigation und Sicherheit übernimmt. Das Verständnis dieser Stufen ist für Stadtplaner entscheidend, da jede Stufe einem spezifischen Anwendungsfall im modernen Verkehrsmarkt dient.
Level 0–2: Fahrerunterstützungssysteme
Die Level 0 bis 2 beschreiben Funktionen, die auf dem heutigen Automobilmarkt bereits weit verbreitet sind und bei denen der Mensch weiterhin als Hauptfahrer gilt. Auch wenn das Fahrzeug durch diese Systeme erhebliche Unterstützung bietet, bleibt die menschliche Überwachung eine zwingende Voraussetzung für einen sicheren Betrieb.
• Level 0 (Keine Automatisierung): Der Mensch übernimmt alle Fahraufgaben, während das System lediglich passive Warnungen wie Totwinkelwarnungen bereitstellt, ohne in die Bewegung des Fahrzeugs einzugreifen.
• Level 1 (Fahrerassistenz): Das System teilt sich die Kontrolle entweder über die Lenkung oder über die Geschwindigkeit durch Funktionen wie den adaptiven Tempomaten, steuert jedoch niemals beides gleichzeitig.
• Level 2 (Teilautomatisierung): Das Fahrzeug kann gleichzeitig die Lenkung sowie Beschleunigung oder Verzögerung steuern, wobei der Fahrer jedoch jederzeit physisch eingebunden bleiben und die Umgebung überwachen muss.
Obwohl diese Unterstützungsfunktionen darauf ausgelegt sind, die Sicherheit zu erhöhen, bleiben sie grundsätzlich menschenzentriert. Sie erfordern eine ständige „Hands-on“-Beteiligung, um sicherzustellen, dass der menschliche Fahrer die letzte Autorität auf der Straße bleibt, und unterscheiden sich damit klar von höheren Stufen unabhängiger Autonomie.
Level 3: Bedingte Automatisierung und die Herausforderung der Übergabe
Level 3 stellt einen bedeutenden Technologiesprung dar, da das Fahrzeug unter sehr spezifischen Bedingungen, etwa im Autobahnverkehr, die Umgebung überwachen und selbstständig fahren kann. Dennoch erfordert diese Stufe weiterhin einen menschlichen „Fallback“, der jederzeit bereit sein muss, einzugreifen. Wenn das System auf eine Situation trifft, die es nicht bewältigen kann, fordert es den Menschen innerhalb weniger Sekunden zur Übernahme auf. Dadurch entsteht ein Kontrollübergang, der weiterhin eine erhebliche logistische Hürde darstellt. Da diese plötzliche „Übergabe“ in komplexen urbanen Umgebungen Sicherheits- und Haftungsfragen aufwerfen kann, überspringt der öffentliche Verkehr diese Stufe häufig zugunsten klarer definierter und besser vorhersehbarer Automatisierungsstufen.
Level 4: Hohe Automatisierung im realen Einsatz
Level 4 markiert den Beginn des echten „fahrerlosen“ Verkehrs, da das Fahrzeug in der Lage ist, alle Fahrfunktionen auszuführen und die Umgebung zu überwachen, ohne dass ein menschliches Eingreifen erwartet wird. Obwohl diese Autonomie auf eine spezifische „Operational Design Domain“ (ODD) beschränkt ist — etwa eine vorab kartierte Stadtschleife oder ein kontrolliertes Campusgelände — agiert das Fahrzeug innerhalb dieser Grenze als alleinige Autorität. Darüber hinaus sind Level-4-Systeme so konzipiert, dass sie bei einem Systemausfall automatisch einen „minimalen Risikozustand“, wie etwa einen sicheren Halt, erreichen. Mit der zunehmenden kommerziellen Nutzung unter realen Bedingungen bieten diese domänenspezifischen Routen die notwendige Struktur, damit das digitale System als primärer Pilot fungieren kann, was diese Stufe für moderne Verkehrslösungen besonders wirkungsvoll macht.
Die Rolle des On-Board-Stewards: Warum ist noch jemand anwesend?
Eine häufige Frage bei Level-4-Einsätzen lautet, warum sich noch eine Person in der Kabine befindet, wenn der Bus tatsächlich autonom ist. Obwohl die Technologie keinen Fahrer für den Betrieb des Fahrzeugs benötigt, setzen viele Betreiber „Safety Operators“ oder „On-Board Stewards“ ein, um das Vertrauen der Fahrgäste zu stärken. Diese Fachkräfte übernehmen wichtige nicht fahrbezogene Aufgaben, wie die Unterstützung von Fahrgästen mit Behinderungen oder die Organisation des Einstiegs zu Stoßzeiten, wodurch sich Fahrgäste leichter an die Technologie gewöhnen können. Zusätzlich erfüllt ihre Anwesenheit häufig aktuelle globale Vorschriften, die während des Übergangs zu vollständig unbemannten Betriebsmodellen weiterhin eine lizenzierte Person als rechtliche Formalität vor Ort verlangen.
Level 5: Vollständige Autonomie — Vision und Realität
Level 5 steht für das ultimative Ziel autonomer Mobilität: ein Fahrzeug, das überall, jederzeit und bei allen Wetterbedingungen ohne menschliche Unterstützung fahren kann. Im Gegensatz zu Level 4 gibt es auf dieser Stufe der Unabhängigkeit weder Geofences noch geografische Begrenzungen, sodass das Fahrzeug auf jeder öffentlichen Straße eingesetzt werden kann. Auch wenn Innovationen weiterhin auf diese universelle Fähigkeit hinarbeiten, bleibt Level 5 im heutigen Markt eher ein langfristiges Forschungs- und Entwicklungsziel als eine kommerziell verfügbare Realität. Daher konzentrieren sich aktuelle kommerzielle Bemühungen weiterhin auf die Weiterentwicklung der Level-4-Technologie, um einen sicheren und effizienten Einsatz in kontrollierten urbanen Umgebungen zu gewährleisten.
Fazit: Die Lücke in der urbanen Mobilität schließen
Für die Zukunft unserer Städte stehen diese Automatisierungsstufen für weit mehr als nur technische Meilensteine; sie sind entscheidende Werkzeuge für soziale und operative Inklusion. Mit dem Eintritt in die Ära der Level-4-Einführung wird der öffentliche Verkehr häufiger, sicherer und für unterversorgte Gemeinschaften zugänglicher. Innovative Lösungen wie der Autonomous e-ATAK und der Autonomous e-JEST beweisen bereits, dass diese Technologie bereit ist, als Rückgrat der modernen, intelligenten Stadt zu dienen. Durch das wirksame Schließen der Lücke der „ersten und letzten Meile“ vervollständigt hohe Automatisierung die Mobilitätskette und stellt sicher, dass die Zukunft des Verkehrs bereits heute einsatzbereit ist.

